
Diseño y construcción de un prototipo de robot móvil con control autónomo o radiofrecuencia e imagen en tiempo real by Nelson Patricio Bastidas Duchi
Robot Móvil
El presente artículo completo lo puedes encontrar en el siguiente link: Diseño y construcción de un prototipo de robot móvil con control autónomo o radiofrecuencia e imagen en tiempo real
Algunos de los materiales que utilizarán los puedes encontrar en nuestra tiena online Ferrustronix:
RESUMEN
Este prototipo de robot se pone en marcha y mediante sensores reconoce obstáculos en escenarios para el cual ha sido definida su programación.
Este robot móvil sirve para la experimentación e investigación en ambientes reales, ya que posee características similares a los robots de aplicación industrial o comercial.
Tiene tres modos de operación, mediante un potenciómetro y la variación de voltaje se puede seleccionar en qué modo desea que trabaje el prototipo sea este como ROBOT AUTÓNOMO SUMO, ROBOT AUTÓNOMO EXPLORADOR y en cualquiera de estos modos mencionados si se manipula el transmisor del control de radio frecuencia el prototipo interrumpe su modo de operación en el que se encuentra.
Una vez interrumpida su operación en cualquiera de los modos este procede a recibir las señale de RF. y pasa a trabajar o funcionar en su tercer modo de operación que es el de CONTROLADO POR RF.
Además en cualquiera de los 3 modos de operación puede trabajar con la imagen en tiempo real ya que tiene un interruptor independiente para encender la mini cámara inalámbrica y podremos visualizar en el ordenador la imagen transmitida por el prototipo.
INTRODUCCIÓN
En este capítulo se desarrolla la parte teórica de la monografía, en la cual se detallan conceptos básicos referentes a los robots móviles, la clasificación, funcionamiento de los sensores de proximidad, la estructura y funcionamiento del microcontrolador PIC16F876A y otros elementos que han sido empleados.
Se ha detectado un mayor interés dentro de los estudiantes de la carrera de Electrónica en cuanto al aprender a controlar robots. Este aprendizaje se ha visto dificultado por el alto costo que resulta construir un robot con las mejores piezas.
Por lo anterior, están obligados a diseñar e implementar prototipos con elementos y materiales, por ejemplo sensores y actuadores, que no tienen las mejores características para ser utilizados en el campo real.
Dentro de la variada gama en el mundo de equipos modulares o módulos de entrenamiento para microcontroladores, se ha detectado que estos están diseñados para funcionar sólo con los componentes de sus propias marcas, por lo que dificulta el trabajo de integración de elementos.
ROBOT
Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de Bots.
No hay un consenso sobre qué máquinas pueden ser consideradas robots, pero sí existe un acuerdo general entre los expertos y el público sobre que los robots tienden a realizar como lo son: moverse, hacer funcionar un brazo mecánico, sentir y manipular su entorno y mostrar un comportamiento inteligente, especialmente si el comportamiento imita al de los humanos o a otros animales.
CLASIFICACIÓN DE LOS ROBOTS
SEGÚN SU CRONOLOGÍA:
La que a continuación se presenta es la clasificación más común:
a) 1ª Generación de Robots manipuladores.
b) 2ª Generación de Robots de aprendizaje.
c) 3ª Generación de Robots con control sensorizado.
d) 4ª Generación de Robots inteligentes.
SEGÚN SU ARQUITECTURA
La subdivisión de los Robots, con base en su arquitectura, es la siguiente:
a) Robots Poli articulados.
b) Robots Móviles.
c) Robots Androides.
d) Robots Zoomórficos.
e) Robots Híbridos.
ROBOT MÓVIL
Son robots con gran capacidad de desplazamiento, su movimiento se basa en carros o plataformas y están dotados de un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sensores. Estos robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación; guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoeléctricamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
A continuación se describen los pilares para el diseño mecánico de un robot móvil, para el que también se pueden tener en cuenta otros puntos de vista. Existe una gran variedad de modos de moverse sobre una superficie sólida; entre los robots, las más comunes son las ruedas, las cadenas y las patas.
Los vehículos de ruedas son los más populares por varias razones prácticas. Los robots con ruedas son más sencillos y más fáciles de construir, la carga que pueden transportar es mayor, relativamente; tanto los robots basados en cadenas como en patas se pueden considerar más complicados y pesados que los robots de ruedas para una misma carga útil. A esto se puede añadir el que se pueden transformar vehículos de ruedas de radio control para usarlos como bases de robots.
ROBÓTICA ( Robot-ica )
La robótica es la ciencia y la tecnología de los robots. Se ocupa del diseño, manufactura y aplicaciones de los robots. La robótica combina diversas disciplinas como son: la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control. Otras áreas importantes en robótica son el álgebra, los autómatas programables y las máquinas de estados.
La robótica es una disciplina que forma parte, junto con la Biónica y la Autómata, de una ciencia mayor que las engloba y toma el nombre de la Cibernética.
El término robot se popularizó con el éxito de la obra RUR (Robots Universales Rossum), escrita por Karel Capek en 1920. La palabra checa robota, que significa trabajos forzados, fue traducida al inglés como robot.
LA ROBÓTICA EN LA ACTUALIDAD
En la actualidad, los robots comerciales e industriales son ampliamente utilizados y realizan tareas de forma más exacta o más barata que los humanos. También se les utiliza en trabajos demasiado sucios, peligrosos o tediosos para los humanos. Los robots son muy utilizados en plantas de manufactura, montaje y embalaje, en transporte, en exploraciones en la Tierra y en el espacio, cirugía, armamento, investigación en laboratorios y en la producción en masa de bienes industriales o de consumo.
Existe una gran esperanza, especialmente en Japón, de que el cuidado del hogar para la población de edad avanzada pueda ser desempeñado por robots.
Los robots parecen estar abaratándose y reduciendo su tamaño, una tendencia relacionada con la miniaturización de los componentes electrónicos que se utilizan para controlarlos. Además, muchos robots son diseñados en simuladores mucho antes de construirse y de que interactúen con ambientes físicos reales. Un buen ejemplo de esto es el equipo Spiritual Machine, un equipo de 5 robots desarrollado totalmente en un ambiente virtual para jugar al fútbol en la liga mundial de la F.I.R.A.
Además de los campos mencionados, hay modelos trabajando en el sector educativo, servicios (por ejemplo, en lugar de recepcionistas humanos o vigilancia) y tareas de búsqueda y rescate.
SENSOR
Los sensores son normalmente transductores que convierten un fenómeno físico en señales eléctricas los mismos que un microcontrolador o PC leen, esto gracias a un convertidor analógico digital (ADC), en el que se carga un valor de un puerto de entrada y salida ó se usa una interrupción externa; comúnmente se necesita alguna interface electrónica entre el sensor y la computadora o microcontrolador para acondicionar y/o amplificar la señal.
SENSORES DE PROXIMIDAD
El sensor de proximidad es un transductor que detecta objetos o señales que se encuentran cerca del elemento sensor. Existen varios tipos de sensores de proximidad según el principio físico que utilizan. Entre los sensores de proximidad más comunes se encuentran los siguientes:
- Sensor capacitivo
- Sensor inductivo
- Sensor fin de carrera
- Sensor infrarrojo
- Sensor ultrasónico
- Sensor magnético
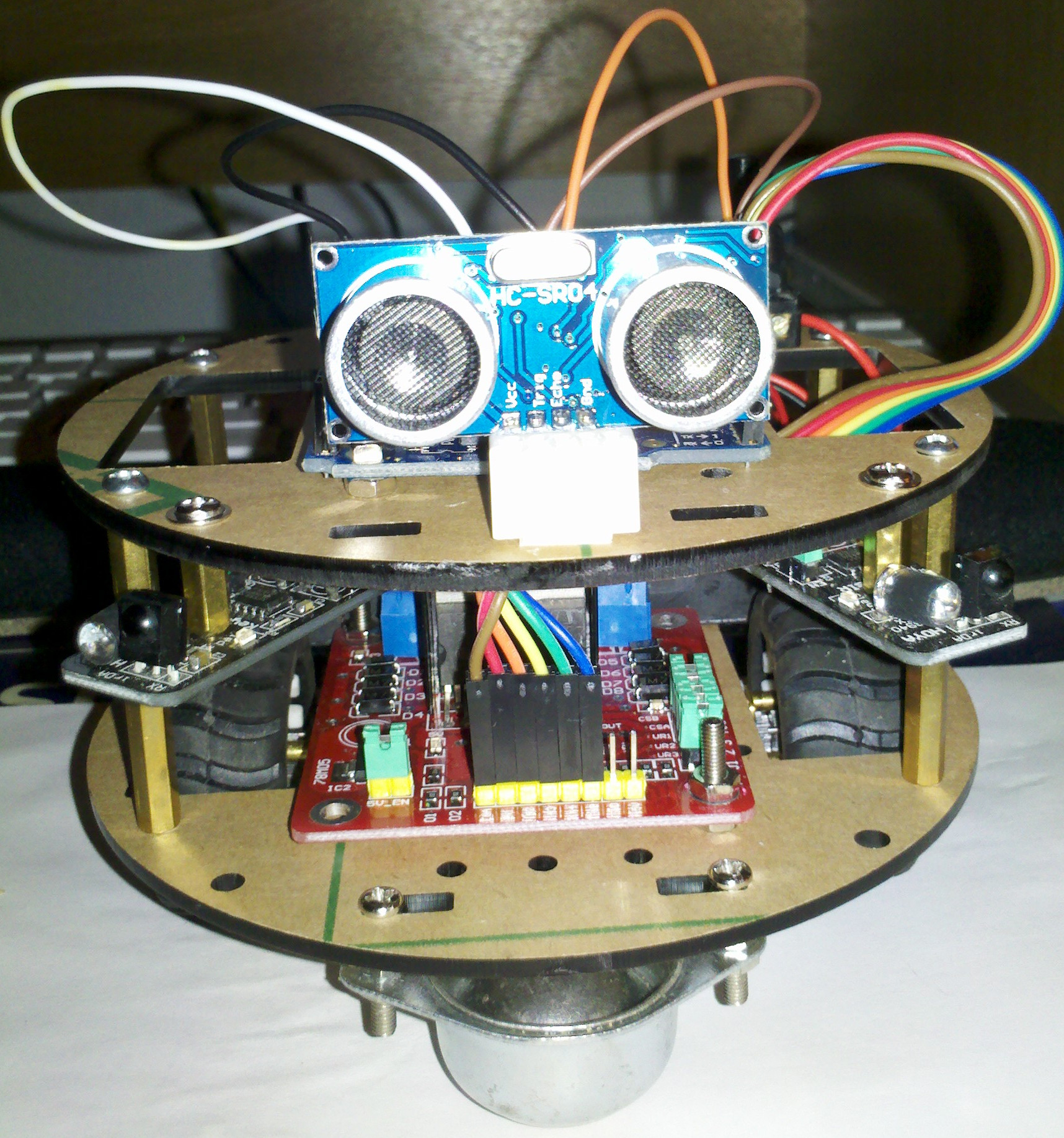
SENSOR ULTRASÓNICO
Los sensores ultrasónicos tienen como función principal la detección de objetos a través de la emisión y reflexión de ondas acústicas. Funcionan emitiendo un pulso ultrasónico contra el objeto a sensar; al detectar el pulso reflejado se para un contador de tiempo que inició su conteo al emitir el pulso. Este tiempo es referido a distancia y de acuerdo con los parámetros elegidos de respuesta con ello, manda una señal eléctrica digital o analógica.

Sensor Ultrasónico HC-SR04
BIBLIOGRAFÍA
Bastidas Duchi, N. P., & Sánchez Cabezas, O. G. (2011). Diseño y construcción de un prototipo de robot móvil con control autónomo o radiofrecuencia e imagen en tiempo real.



Comentarios recientes