
Diseño e implementación de un cuadracóptero con sistema de control automáticoy comunicación inalámbrica by Daniel Barrera Núñez

Cuadracóptero
El presente artículo completo lo puedes encontrar en el siguiente link: Diseño e implementación de un cuadracóptero con sistema de control automático de estabilidad y comunicación inalámbrica de datos utilizando plataformas de hardware y software libre
Algunos de los materiales que utilizarán los puedes encontrar en nuestra tiena online Ferrustronix:
Resumen del artículo:
Hardware del Arduino Uno
Dado que para el presente proyecto se decidió utilizar el Arduino Uno, se va a profundizar un poco en sus características particulares. El Arduino Uno es uno de los integrantes de la familia de PCBs de Arduino, y es un microcontrolador basado en el ATmega328. Este microcontrolador posee 14 pines de entrada/salida digitales, de los cuales 6 se pueden utilizar como salidas PWM (señales de modulación por ancho de pulso). Además, posee 6 entradas analógicas, un oscilador de 16 MHz, un conector USB para comunicación con una PC, un conector de alimentación y un botón de reset.

Arduino (El modelo puede variar en la imagen)
Sensores
Las palabras “sensor” y “transductor” son dos términos muy utilizados para referirse a dispositivos de sensado de alguna variable física, sin embargo no significan lo mismo. El término transductor se utiliza cuando se quiere considerar un sistema completo de sensado, donde se lleva a cabo un cambio entre tipos de energía. Un ejemplo de estos sistemas son los acelerómetros (transductores de aceleración), donde un cambio de estado de un sistema mecánico se manifiesta como una salida de tensión eléctrica en el dispositivo. Por otro lado el término sensor es utilizado principalmente para referirse a dispositivos que responden ante algún estímulo del ambiente en el que se encuentran cambiando algún parámetro intrínseco del dispositivo, pero sin realizar ninguna conversión de energía. Un ejemplo de sensores son los termistores, los cuales son dispositivos que simplemente cambian el valor de su resistividad en función de la temperatura del ambiente donde se encuentren. En el presente proyecto, se harán uso de transductores para la medición de los parámetros de control del quadcopter.
Dos características de suma importancia para caracterizar los transductores son la “responsividad” y la “detectabilidad”. El primero de los términos se refiere a la respuesta del transductor ante un cambio de la variable medida, y el segundo se refiere al valor más pequeño de la variable medida que el transductor puede detectar. Estos parámetros resultan más prácticos a la hora de caracterizar un sistema que el término “sensibilidad” (el cual resulta un poco ambiguo).
Dentro de la familia de los transductores se encuentran los sistemas micro electromecánicos, o MEMS por sus siglas en inglés, los cuales son la base de los transductores que son utilizados para la adquisición de la postura del cuadracóptero.
Dispositivo Utilizado (HC-SR04)
El sensor ultrasónico de proximidad que se eligió para la realización del proyecto es el HCSR04, de la compañía ITead Studios. A continuación se puede apreciar una imagen del sensor:

Sensor Ultrasónico HC-SR04
Teoría de Operación del Sensor Ultrasónico
La manera en la que este transductor detecta la proximidad de un objeto es la siguiente. Cuando se introduce un pulso mayor de 10µs en la terminal de “trigger” del dispositivo, el transductor envía una señal ultrasónica que se encuentra compuesta de 8 pulsos de 40 kHz, la cual eventualmente será reflejada por un objeto (en caso de que lo hubiese). A esta señal reflejada se le denomina eco. Desde el momento en el que se emite la señal de 40 kHz hasta que se recibe su eco, el transductor mantendrá un 1 lógico en su terminal denominada “ECO”. Cuando el transductor recibe de vuelta esta señal la convierte en una señal eléctrica, y el siguiente pulso no podrá ser transmitido hasta que el eco de la señal anterior haya desaparecido. Este tiempo que transcurre entre el momento en que se envía el primer pulso ultrasónico hasta que se puede enviar el próximo se denomina periodo de ciclo (cycle period). El periodo de ciclo mínimo recomendado es de 50 ms. La distancia medida por el transductor es proporcional al tiempo que dure la señal de la terminal de ECO en alto (que en este caso es una tensión de 5 volts). Si no se detecta ningún obstáculo frente al sensor ultrasónico, este dará una señal de 38 ms en alto en su terminal de ECO.
Comunicaciones Inalámbricas
Comunicación Serial
Las comunicaciones seriales se refieren al proceso de transmitir datos un bit a la vez, de una manera secuencial por medio de algún canal de comunicación. Este tipo de comunicaciones se realiza cuando el costo de tener varios canales es muy alto, o cuando realizar un proceso de sincronización de varias señales resulta complicado. La desventaja de las comunicaciones seriales, es que poseen tasas de transmisión de datos más bajas que las comunicaciones en paralelo, dado que se pueden transmitir menos datos por unidad de tiempo, sin embargo, resulta ventajoso para reducir costos cuando la velocidad de transmisión de datos no es un factor fundamental para la operación del dispositivo. Como ejemplos de los buses más conocidos que implementan comunicación de tipo serial se pueden mencionar: SPI, I2C (ambas pueden ser implementadas mediante el Arduino), USB, PCI, Bluetooth y 1-Wire.
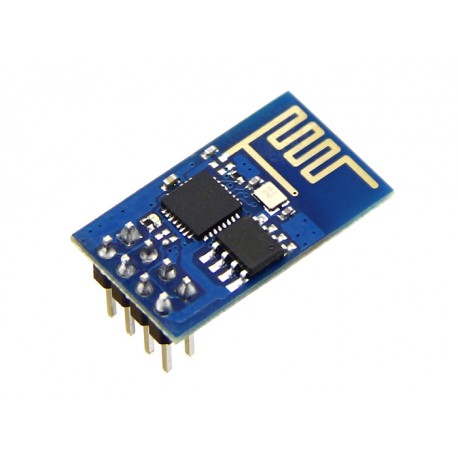
Módulo Serial a Wifi ESP8266
BIBLIOGRAFÍA
Núñez, D. B. (2012). Diseño e implementación de un cuadracóptero con sistema de control automático de estabilidad y comunicación inalámbrica de datos utilizando plataformas de hardware y software libre.



Comentarios recientes