
Definiciones de Robots y tipos de robots

Myon – robot Humanoide
El origen de la palabra es ficcional y quiere decir esclavo. Nació a partir de la novela R.U.R. (1920) del checo Karel Capek. En rigor, lo que sucedió es que a lo largo del tiempo su significado fue mutando. Al principio, un robot era un dispositivo que podía llevar a cabo tareas preprogramadas; y estaba más orientada a robots fijos. Y a medida que se fueron desarrollando y tomando fuerza otros aspectos de la robótica, como la robótica móvil o la capacidad de tomar información del entorno, la definición de robot cambió. Básicamente, un robot es un dispositivo capaz de sensar su entorno y cambiar su comportamiento de modo de garantizar la concreción de una tarea. La definición más nueva –más vanguardista incluye la capacidad de auto repararse y de duplicarse
Aviones autónomos o UAV
Unmanned Air Vehicle es la expresión inglesa empleada para identificar aviones capaces de volar sin necesidad de piloto. Es decir, un sistema informático que combina GPS, GIS, servomecanismos y CPU se encarga de pilotar el avión sin que sea necesario disponer de un piloto en la cabina.

A MQ-9 Reaper unmanned aerial vehicle prepares to land after a mission in support of Operation Enduring Freedom in Afghanistan. The Reaper has the ability to carry both precision-guided bombs and air-to-ground missiles. (U.S. Air Force photo/Staff Sgt. Brian Ferguson)
Los UAV se emplean principalmente en misiones de reconocimiento y el principal país que los emplea es los EEUU, que dispone de diferentes modelos de UAV de reconocimiento.
A medida que la potencia de estos sistemas informáticos va en aumento, las funciones que realizarán estos robots también aumentará. La lógica indica que la evolución de los UAV ira desde los aviones de reconocimiento, pasando por los aviones de bombardeo para llegar hasta el empleo de cazas autónomos y en ultima instancia helicópteros autónomos.
Existen diferentes proyectos de desarrollo entre las principales empresas de aeronáutica como BOEING para diseñar y fabricar aviones autónomos.
Robots polimórficos o multimorficos .- Robots capaces de adaptar diferente formas físicas de manera autónoma.
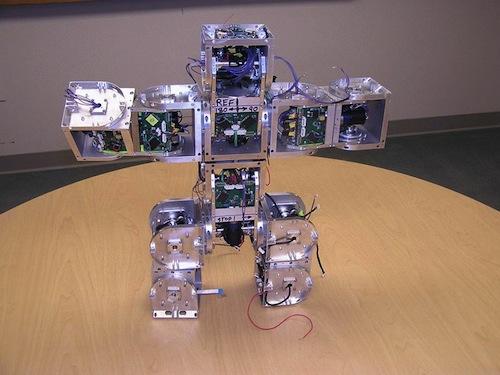
Robot Polimórfico
Robot Rover.- Robot con ruedas u orugas capaz de desplazarse por territorios de diferente naturaleza, habitualmente se usa para investigar territorios hostiles donde resultaría peligroso, demasiado costoso o incluso imposible llevar a un ser humano.

Curiosity
Robot Segway.- Es un robot con dos ruedas que no están dispuestas en línea como en una bicicleta sino que están dispuestas en paralelo. El robot consigue mantener el equilibrio sobre el suelo gracias a sus múltiples sensores que proporcionan información sobre su estabilidad. Tiene suficiente fuerza como para desplazar a un ser humano sobre él.

Segway Ninebot
Robot humanoide.- Es un robot que presenta las características de un ser humano: dos piernas, dos brazos, torso y cabeza.

Asimo
Robot Bípedo
- Robot Bípedo: Es un robot que dispone de dos piernas para desplazarse.
- Robot Bípedo Dinámico: Robot cuyo sistema de locomoción está basado en dos piernas y que es capaz de andar sin necesidad de interrumpir su avance.
- Robot Bípedo Estático: Robot cuyo sistema de locomoción está basado en dos piernas y que debe interrumpir su avance al andar para garantizar el equilibrio.
Robots ápodos.- Robots que no están dotados de partes móviles diferenciadas de su tronco, como pueden ser piernas o patas. Son robots apodos los que imitan el comportamiento de serpientes, gusanos, caracoles y otros organismos vivos que emplean su propio tronco central para desplazarse.
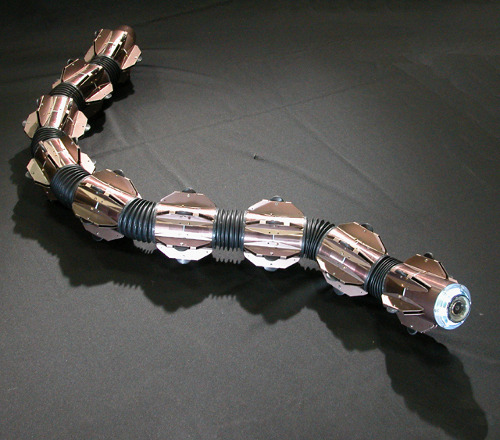
Snakebot
Robots colaborativos.- Robots que interactúan entre si para desarrollar una labor conjunta, también se les suele llamar “Enjambre de Robots” o “Colmena”.

Robots Colmena
Robots mayordomo.- Un robot mayordomo es un robot diseñado para trabajar en las tareas del hogar, por lo tanto debe ser capaz de desempeñar múltiples tareas diferentes: desde planchar hasta fregar, pasando por cocinar o hacer las camas. Todas estas tareas son extremadamente difíciles de programar (por no decir imposible) en código que un ordenador pueda entender y por lo tanto diseñar este tipo de robots supone un gran reto para los Ingenieros. Resulta extremadamente difícil desarrollar robots que interactúen con un entorno tan abierto como el de un hogar, son demasiados los parámetros que se deben procesar y demasiadas las opciones que se deben contemplar.

Nanisha UPAEP
Robots de servicio.- Los robots de servicio nos permitirán llevar la revolución industrial a los hogares, calles, colegios, hospitales, la tercera revolución industrial la están escribiendo los robots que puede ver a continuación:
Robots humanoides (bípedos):
- P3 de Honda.
- ASIMO de Honda.
- QRIO de Sony.
- HOAP de Fujitsu.
- MORPH de varios.
- HRP de AIST y Kawada Industries.
- Robot humanoide de Toyota.
Robots de servicio comercializados:
- Wakamaru de Mitsubishi (2004)
Robots de exploración marciana:
- Pathfinder (1997)
- Spirit y Opportunity (2003-2004)
- Beagle 2 (2003-2004)
Robots de logística en orbita:
- CanadaArm2 (2001)
- Dextre (2003-2006)
Otros robots:
- Máquina de carga articulada, T522 Enryu
- Robot alimentado por moscas Ecobot (2004)
- RoboCoaster, un robot para el parque de atracciones
- RoboSapien de WooWee
Robots de ciencia ficción.- Los robots de ciencia ficción pueden parecer maquinas imposibles, sueños alocados de guionistas imaginativos, pero la realidad es que todos esos robots son, en mayor o menor medida, reales.
Robots industriales.- Los robots industriales son robots que se emplean para tareas vinculadas con la producción de bienes de origen manufacturado en fábricas o industrias.
Los tipos más habituales son:
- – Robots de paletizado
- – Robots de soldadura
- – Robots de carga y descarga
- – Robots scara
- – Robots de ensamblaje
- – Robots para aplicación de pintura
- – Robots para inspección de productos
En este link pueden leer las especificaciones de cada uno de los nombrados arriba, así que si quieren saber santo y seña de sus diseños les recomiendo la visiten
WWW robot
Usando nuestra terminología de “andar por casa” son robots que entran en todos los servidores de todo el mundo, buscan los documentos que están alojados en ellos, los incluyen en su index y luego nosotros podamos ir a ese index a buscar lo que necesitamos.
Los robots se les suele denominar “Web Wanderers”, “Web Crawlers”, o “Spiders” hay quién piensa que son virus pero no es así, un robot simplemente visita los sitios y extrae los enlaces que están incluidos dentro de estos.
• Arañas (Spiders): Es un robot, pero otorga resultados más fríos.
• Gusanos (Worms): Es lo mismo que un robot, aunque técnicamente un gusano es una réplica de un programa, a diferencia de un robot que es un programa original.
• Orugas (Web crawlers): Es lo mismo que un robot, pero un tipo específico de robot.
• Hormigas (WebAnts): Cooperativa de robots.
Eventos más importantes:
- Darpa Grand Challenge, o la carrera del millón de dólares
- Eurobot
- FIRA Soccer Cup
- First
- Hispabot
- International Robot Exhibition
- IDC Robocon
- La Olimpiada Robótica de David Calkins
- Concurso nacional de México
- Robocup
- Robot Wars
- Robonexus

Comentarios recientes